Nanotecnologia medica: i microrobot acusticamente controllati
La nanotecnologia medica è una delle aree più innovative e promettenti della medicina contemporanea. Consentendo l’ingegneria e la manipolazione di strutture e dispositivi a scala nanometrica, la nanotecnologia ha il potenziale per trasformare radicalmente il modo in cui affrontiamo una vasta gamma di sfide mediche, tra cui il trattamento di malattie, la diagnosi e il monitoraggio. In questo contesto, l’emergente campo dei microrobot rappresenta un’area di ricerca di grande interesse, poiché offre nuove possibilità per la consegna di farmaci mirati, l’accesso a luoghi difficilmente raggiungibili nel corpo umano e la manipolazione di piccoli oggetti a livello microscopico.
Uno sviluppo di grande rilevanza in questo campo è l’introduzione dei microrobot controllati acusticamente ispirati dai batteri Spirochete. Questi microrobot, creati attraverso una combinazione di avanzate tecnologie di stampa 3D e l’uso di fenomeni acustici, offrono un’interessante prospettiva sulla nanotecnologia medica. Questo articolo esplorerà in dettaglio il concetto e le applicazioni di questi microrobot, esaminando la loro progettazione, il loro comportamento in ambienti tridimensionali e le implicazioni future per la medicina.
Indice
Ispirazione dalla natura
L’ispirazione per questi microrobot deriva dalla natura stessa, in particolare dai batteri Spirochete. Questi microrganismi sono noti per il loro movimento a spirale caratteristico, che è stato adattato e replicato artificialmente nei microrobot. La forma a spirale consente ai batteri Spirochete di muoversi in modo efficace attraverso ambienti viscosi, come il tessuto biologico, e di navigare attraverso ostacoli con relativa facilità. Riprodurre questo tipo di movimento nei microrobot può avere applicazioni significative nella consegna mirata di farmaci e nella navigazione in aree complesse del corpo umano.
Progettazione e fabbricazione
La chiave per la realizzazione di questi microrobot è la progettazione e la fabbricazione precisa della loro struttura a spirale. Questo viene realizzato utilizzando una tecnica di stampa 3D avanzata nota come litografia laser a due fotoni. In questo processo, una goccia di resina fotosensibile viene posta su un vetrino di vetro rivestito di ossido di indio-stagno (ITO), che funge da base per la stampa. Un potente laser a due fotoni è quindi utilizzato per esporre e indurire strato per strato la resina in modo altamente preciso. Il risultato è una struttura a spirale tridimensionale, che costituirà il corpo del microrobot.
Una volta completata la fabbricazione, il microrobot viene rimosso dalla base di vetro e può essere manipolato per eseguire varie azioni. La sua struttura a spirale è progettata per interagire con i fenomeni acustici e tradurre queste interazioni in movimenti direzionali. Questo è il cuore del concetto dei microrobot controllati acusticamente.
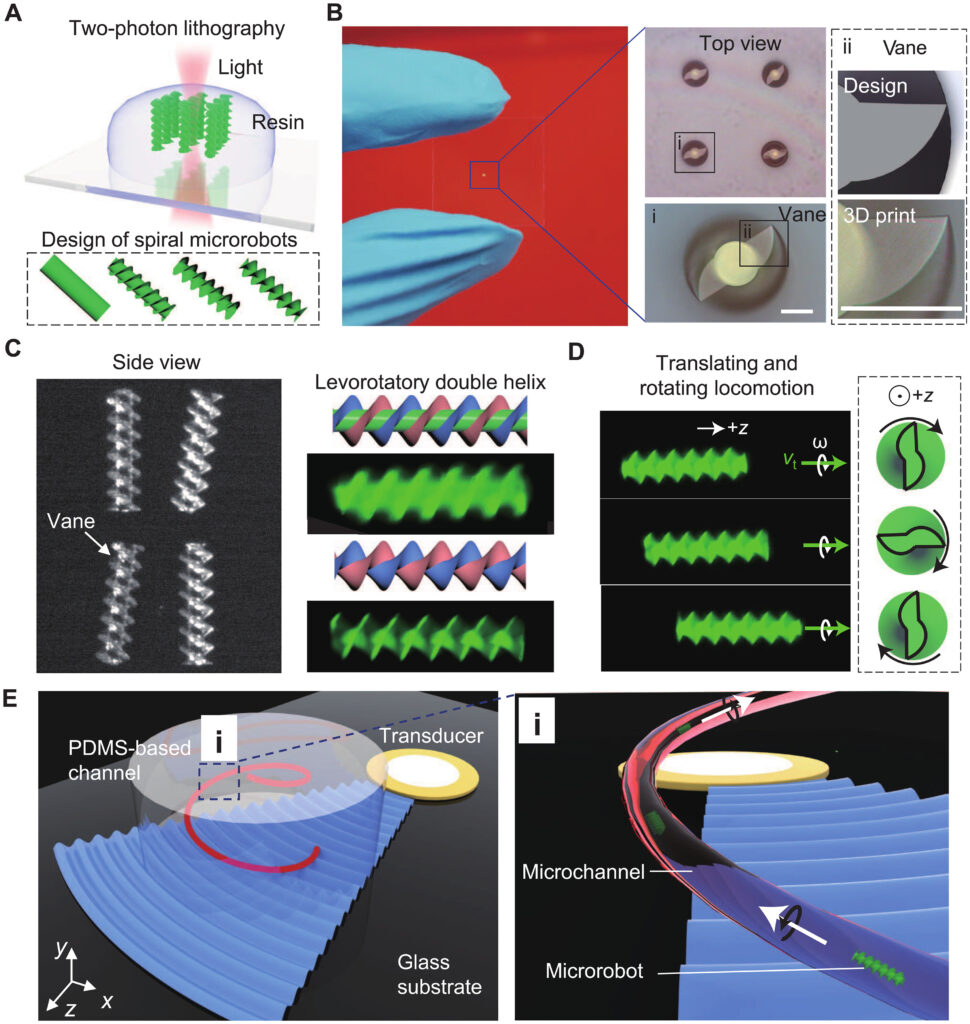
(A) I microrobot acustici elicoidali sono prodotti in serie utilizzando la tecnica della litografia a due fotoni.
Il riquadro inferiore mostra diversi design dei microrobot dotati di palette elicoidali con raggio
r d = 1,0, 0,65, 0,43 e 0,22.
(B) Micrografia che illustra la vista dall’alto dei microrobot fabbricati su un vetrino sottile.
Nel riquadro è mostrato il dettaglio della paletta.
(C) Vista laterale dei microrobot fabbricati.
Micrografie schematiche e fluorescenti (a destra) che illustrano le strutture delle palette elicoidali sul microrobot con
rd = 0,43 e 0,22.
I colori rosa e blu rappresentano le due rispettive palette levogire a doppia elica sviluppate sul microrobot.
(D) Le sequenze di immagini dimostrano il movimento traslatorio e rotatorio dei microrobot acustici in risposta a uno stimolo acustico a 13,5 kHz.
Gli inserti mostrano la rotazione in senso orario del microrobot, che è indicata dall’orientamento della geometria della pala.
(E) Schema dell’apparato sperimentale.
Il microcanale a base di polidimetilsilossano (PDMS) è stato incollato su un vetrino adiacente a un trasduttore piezoelettrico, che genera il campo delle onde acustiche.
L’inserto illustra la manipolazione del microrobot all’interno di un microcanale di forma arbitraria.
Barre di scala, 40 μm.
Controllo acustico
La caratteristica distintiva di questi microrobot è la loro capacità di rispondere a stimoli acustici provenienti dall’esterno del corpo. Questo è reso possibile dalla loro struttura a spirale e dalla loro capacità di interagire con le onde sonore. Quando il microrobot viene esposto a un campo acustico, le onde sonore interagiscono con la sua superficie a spirale e inducono una serie di movimenti complessi.
Il movimento avviene in due modalità principali: rotazione e traslazione. La rotazione è il risultato dell’interazione tra le onde sonore e la struttura a spirale del microrobot. Le onde sonore esercitano una pressione variabile sulla superficie a spirale, causando la sua rotazione attorno all’asse longitudinale del microrobot. Questo movimento rotatorio è simile al modo in cui un elicottero può cambiare direzione ruotando le sue pale.
La traslazione, d’altra parte, è il risultato dell’effetto combinato delle onde sonore e della forma a spirale. Le onde sonore inducono un flusso di fluido attorno al microrobot, creando una sorta di corrente che spinge il microrobot nella direzione desiderata. Questo movimento può essere controllato variando la frequenza e l’intensità delle onde sonore.
Caratteristiche dei microrobot
I microrobot risultanti da questa tecnologia presentano una serie di caratteristiche sorprendenti che li rendono adatti per una varietà di applicazioni. Ecco alcune delle loro caratteristiche chiave:
Propulsione a basso numero di Reynolds
Una delle sfide principali nella progettazione di microrobot è la capacità di muoversi in modo efficace a scale così ridotte. Il numero di Reynolds è un parametro critico che descrive il regime di flusso in cui si trovano i microrobot. A basse velocità e dimensioni ridotte, i microrobot operano a bassi numeri di Reynolds, il che significa che i tradizionali meccanismi di propulsione, come quelli basati sulla viscosità, non sono efficaci. Tuttavia, grazie al loro movimento a spirale controllato acusticamente, questi microrobot possono superare questa sfida e muoversi in modo efficiente anche a bassi numeri di Reynolds.
Movimento bidirezionale
Un’altra caratteristica distintiva di questi microrobot è la loro capacità di muoversi in entrambe le direzioni. Questo significa che possono essere spinti in avanti o indietro a seconda della frequenza e dell’intensità delle onde sonore applicate. Questa capacità di movimento bidirezionale è estremamente preziosa, soprattutto quando i microrobot devono navigare in ambienti complessi e incontrare ostacoli.
Navigazione 3D
Una delle applicazioni più interessanti di questi microrobot è la loro capacità di navigare in ambienti tridimensionali. Questo è dimostrato dalla creazione di microcanali con varie inclinazioni per simulare ambienti tridimensionali. I microrobot possono muoversi su e giù lungo questi canali in risposta alle onde sonore, dimostrando la loro capacità di navigare in modo efficace in spazi 3D. Questa capacità li rende ideali per esplorare vascolature complesse o per raggiungere aree difficilmente accessibili all’interno del corpo umano.
Potenziali applicazioni
I microrobot controllati acusticamente ispirati dai batteri Spirochete aprono la strada a una serie di applicazioni promettenti nella nanotecnologia medica. Alcune delle applicazioni potenziali includono:
Drug Delivery
Uno dei principali settori di utilizzo di questi microrobot è la consegna mirata di farmaci. Possono essere caricati con farmaci o agenti terapeutici e guidati con precisione verso il sito desiderato nel corpo umano. Questo riduce notevolmente la quantità di farmaco necessaria e minimizza gli effetti collaterali.
Esplorazione vascolare
I microrobot possono essere utilizzati per esplorare le vascolature del corpo umano, comprese le arterie più piccole e i capillari. Questo potrebbe essere utile per diagnosi e trattamenti minimamente invasivi.
Manipolazione di micro oggetti
Grazie alla loro capacità di movimento controllato, i microrobot possono essere utilizzati per manipolare oggetti microscopici, come cellule o tessuti, in laboratori o ambienti medici.
Monitoraggio in vivo
Questi microrobot potrebbero anche essere utilizzati per scopi di monitoraggio in vivo. Possono essere dotati di sensori per raccogliere dati all’interno del corpo umano e trasmetterli ai medici per valutazioni in tempo reale.
Sfide e ricerche future
Nonostante il grande potenziale dei microrobot controllati acusticamente, ci sono ancora alcune sfide da affrontare e aree di ricerca futura da esplorare. Alcune di queste sfide includono:
Ottimizzazione della progettazione
Mentre questi microrobot sono già altamente efficienti, c’è spazio per l’ottimizzazione della loro progettazione. Variabili come la forma a spirale, le dimensioni e i materiali potrebbero essere studiate in modo più approfondito per migliorare ulteriormente le prestazioni.
Scalabilità
Attualmente, questi microrobot hanno dimensioni microscopiche, ma la scalabilità è un aspetto importante da considerare. Come influenzerà la loro capacità di movimento a scala nanometrica? Questo è un argomento di ricerca che richiederà ulteriori indagini.
Controllo preciso
Anche se i microrobot sono in grado di muoversi in modo efficiente, il controllo preciso delle loro azioni è una sfida continua. Migliorare la precisione del controllo acustico è un’area di interesse.
Applicazioni cliniche
Perché questi microrobot possano diventare una realtà clinica, è necessario condurre ulteriori studi e test per garantire la loro sicurezza ed efficacia nei pazienti. Questo richiederà una collaborazione stretta tra scienziati, ingegneri e professionisti medici.
Conclusioni
I microrobot controllati acusticamente ispirati dai batteri Spirochete rappresentano un’innovazione significativa nella nanotecnologia medica. La loro capacità di muoversi in modo efficace, la loro versatilità nelle applicazioni e la possibilità di navigare in ambienti tridimensionali offrono opportunità uniche per il miglioramento dei trattamenti medici e delle diagnosi. Mentre ci sono ancora sfide da affrontare, il futuro sembra promettente per questi microrobot, e la loro integrazione nella pratica clinica potrebbe avvicinarsi sempre di più, portando a benefici tangibili per i pazienti e avanzamenti significativi nella medicina.
Fonte: science.org